大寰AG-145夾爪概況及安裝指南
發布時間:2022-03-03 15:08:47 作者:顯揚科技
大寰AG-145 兩指自適應夾爪是一款先進的自適應兩指夾爪機械手,具有0-145mm 以及15-95N 的大行程、大抓持力特性。可對關節手指位置、速度和抓取力進行精確控制,支持抓取不同軟硬、不同重量的物體。采用多連桿結構設計的手指,可以進行平行、包絡抓取,可適用于不同大小、形狀的物體,從而使抓取更穩定,更安全。
下圖為 AG-145 夾爪結構示意圖,標注了 AG-145 夾爪的各個組成部分,方便用戶對 AG-145 夾爪的組成部分有相應的了解。
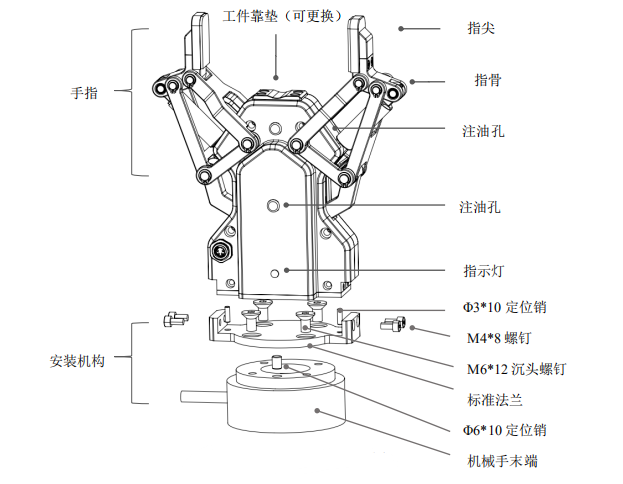
圖1 AG-145 夾爪結構示意圖
一、機械安裝
第一步:如下圖2所示,將標準法蘭安裝在機械手臂末端。
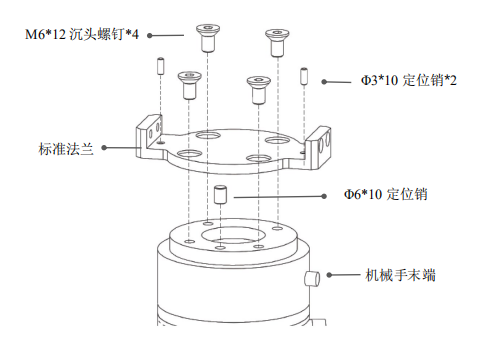
圖2 安裝標準法蘭
第二步:如圖3 所示,將 AG-145 夾爪安裝在法蘭盤上,并鎖緊兩側螺絲。
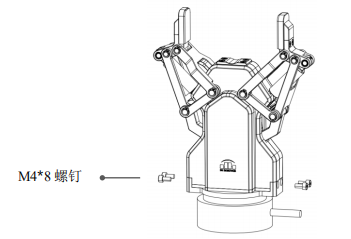
圖3 安裝 AG-145 夾爪
夾爪安裝方式說明
·安裝 Φ6*10 定位銷,將法蘭與機械手末端精準定位。
·鎖緊 M6*12 沉頭螺釘,將法蘭固定。
·安裝 Φ3*10 定位銷,為 AG-95 夾爪提供定位。
二、電氣安裝
AG-145 兩指自適應夾爪,采用 CAN 總線通訊方式進行通訊,它支持 CAN2.0A 版本。 對于不支持 CAN 總線的環境,我們在產品清單提供了通訊協議轉換器, 用于將其他通訊協議(USB、TCP/IP、RS485、I/O 等)轉換到 CAN2.0A,從而支持不同的 通訊協議與控制器(PC/PLC/機器人)連接。如果系統本身支持 CAN 總線,您也可以直接將夾爪連接到系統,而不需要使用通訊協議轉換器。
夾爪電氣連接說明
·使用我司提供的航插線纜連接夾爪與通訊協議轉換器。
·將電纜彎曲的一端插入夾具端;將電纜的直端插入轉換器。
·Ethernet、RS485、USB、IO、CAN 以及電源的接口已經分別在通訊協議轉換器側板上標出,用戶可根據需求將相應端口與控制器相連。
您可參照電氣連接示意圖對夾爪進行通信連接(如圖4 所示)

圖4 電氣連接示意圖
我們以 Ethernet 連接為例,對通訊連接轉換器進行連接,如圖 5 所示。
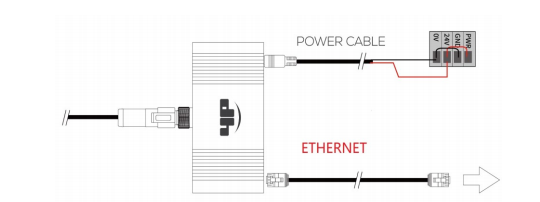
圖5 Ethernet 連接說明圖
Ethernet 連接說明
·將電源電纜的黑色線纜連接至電源 0V 電源端。
·將電源電纜的紅色線纜連接至電源 24V 電源端。
·將以太網線連接通訊協議轉換器與機器人控制器/上位機接口。
顯揚科技是大寰夾爪官方代理商,提供穩定可靠大寰夾爪,并能夠提供配套的軟件,為客服提供充足的售后保障,原廠售后、保修服務等。顯揚科技眾多高校以及眾多中小型企業等提供了多臺大寰夾爪,客戶滿意度極高。顯揚科技對教育科研領域提供優惠,為客戶提供低價采購大寰夾爪的渠道。
顯揚科技通過自主研發的高速高清三維機器視覺設備,以及智能工業機器人系統,聯合多個知名機器人與機器人夾具企業,構建了一個機器人生態系統。顯揚生態的產品能夠完美的與顯揚科技的機器視覺產品結合,包含通信協議、圖形處理SDK、操作案例等。顯揚科技同時是這些企業的代理商,可以提供可靠、性價比高的產品。目前顯揚科技生態系統包括以下品牌:UR優傲協作機器人 、AUBO遨博移動機器人、Franka Emika 協作機器人、艾利特Elite協作機器人、Kuka iiwa 協作機器人、ABB工業機器人、海康工業鏡頭 、海康工業相機、伯朗特工業機器人、 愛普生Epson工業機器人、 robotiq夾爪 、robotiq真空吸盤、robotiq腕部相機、慧靈機器人電爪 、大寰機器人電爪、研華工控機、超恩工控機、創想三維3D打印機 、Mir AGV、機器人關節、精密機械加工服務。通過顯揚生態,客戶可以快速找到合適的機器人本體、夾具等,并快速部署基于顯揚三維機器視覺產品的工業應用。

上一篇:艾利特EC612機器人示教器如何使用?
下一篇:Franka機器人的注意事項

