基于顯揚科技3D視覺相機的機器人軟包拆碼垛系統
發布時間:2023-05-09 18:56:50 作者:顯揚科技
行業現狀:
隨著企業的持續發展,生產規模不斷擴大,傳統的人工操作已難以適應大規模的貨物分揀和堆垛需求。為實現更高校、更精確、更靈活的作業,越來越多企業開始采用“3D視覺+機器人”自動化方案。
3D視覺技術可以快速捕捉、識別、定位貨物三維信息,其與機器人結合的智能解決方案具有高速度、高精度、強穩定的優勢,可以大幅縮短作業時間,提高作業效率,并且可以7x24h不間斷工作,最大限度減少人工參與,規避因操作失誤帶來的生產風險,實現全自動高校的貨物分揀、搬運和堆垛。

行業難點:
1.勞動力成本持續上升:在人口紅利退潮的背景下,人工成本節節攀升,企業需要尋找更為經濟實惠的貨物分揀和堆垛方案;
2.生產效率要求提高:現代物流和生產業發展迅速,市場需求增長對企業生產能力提出了更高要求,企業需要更高效的作業方式、更快速的貨物處理速度;
3.操作精度要求提高:隨著業務量增加和工藝升級,人工操作容易出現誤差和疏漏,難以達到高精度的作業要求,影響作業質量;
4.生產規模擴大:隨著企業生產規模的擴大,人工操作難以適應大規模的貨物分揀和堆垛需求;
5.安全性要求提高:人工操作往往需要在高架貨架、狹小空間等危險環境中進行,存在較高安全風險;
解決方案:
系統組成:
-
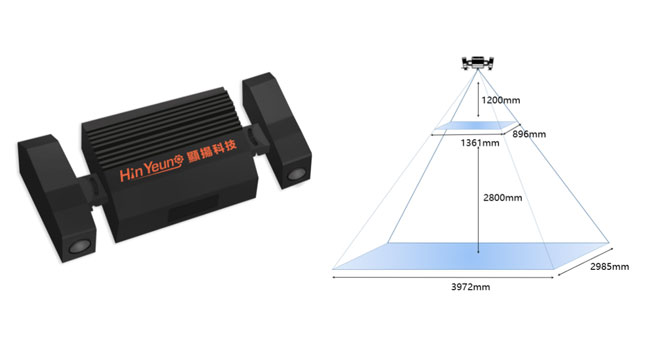
3D視覺傳感器:用于捕捉目標物體的三維信息。
-
機器人臂:執行拆碼垛任務的機械臂,需要具備足夠的負載能力和精度。
-
抓手:連接在機器人臂上的執行器,負責抓取和放置物品。
-
控制系統:包括機器人控制器、視覺處理模塊等,負責整個系統的運行和協調。
-
智能算法:包括物體識別、定位、深度學習、路徑規劃等算法,確保系統能夠正確執行任務。

工作原理:
-
3D視覺傳感器掃描:系統啟動后,3D視覺傳感器對目標區域進行掃描,獲取物體的三維信息。
-
物體識別與定位:通過對掃描數據進行處理,系統識別出各個物體的位置、形狀和尺寸。
-
路徑規劃:根據物體位置信息,系統規劃機器人臂的移動路徑,避免碰撞和滯后。
-
執行拆碼垛任務:機器人臂按照規劃的路徑,配合抓手抓取和放置物品,完成拆碼垛任務。
-
實時監控與調整:系統實時監控任務執行情況,如發現異常,可通過調整路徑或重新識別物體等方式進行自適應調整。
核心技術:
-
超大視野三維成像,大景深,毫米級精度,對反光塑料、軟包等材料三維成像效果好,抗環境光干擾,支持混合拆垛碼垛。

項目優勢:
-
降低人工成本:減少對人工的依賴,降低勞動力成本;
-
改善工作環境:該系統可以在高溫、高濕、高粉塵等惡劣環境中工作,減輕工人勞動強度;
-
提高安全性:該系統可以取代人工進行高空、重物等危險工作,降低工作場所的安全風險;
-
提高生產效率:該系統可以持續、高效地工作,大幅提升生產效率;
-
減少錯誤:通過3D視覺識別和深度學習實現精確控制,機器人可以減少人為錯誤,提高產品質量;
-
靈活性強:可根據不同的貨物和作業環境,進行快速而精準的搬運路線和動作規劃,進行柔性化智能生產。
項目總結:
基于3D視覺的機器人軟包拆碼垛系統通過自動化技術提高了生產效率,降低了成本,并為工作環境帶來改善。隨著技術的不斷發展,這類系統將在越來越多的領域得到應用。
顯揚科技由香港中文大學博士團隊創建,主要研究并產業化高速高清三維機器視覺系統,以及智能工業機器人系統。其研發的三維機器視覺設備精度能達亞微米級,三維數據采集幀率高達310幀,此外還具有高精度、大景深、高穩定性的優勢,可實現高效率機器人引導,以及工業檢測與測量。顯揚科技的產品主要應用在對采集速度要求較高的快速工業產線、物流樞紐以及對測量精度要求高的精密制造、軍工航天、半導體產業等。


