如何選擇合適的Robotiq夾具?
發布時間:2021-12-07 15:18:45 作者:顯揚科技
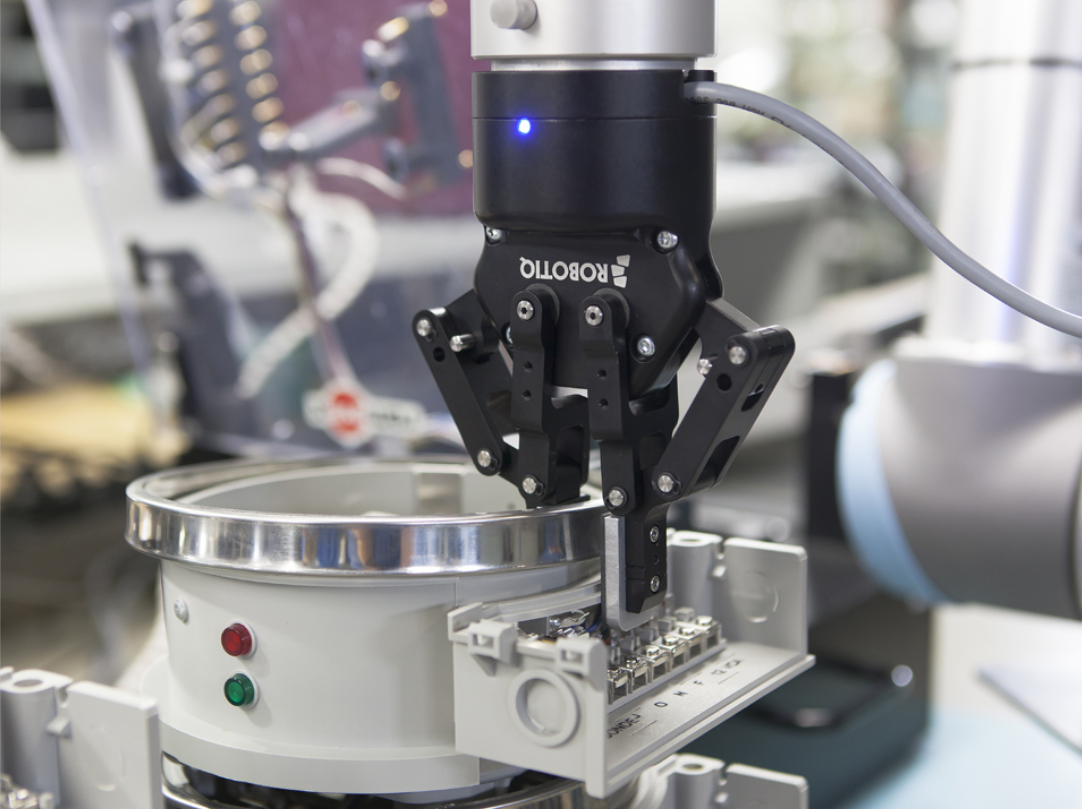
機器人夾爪始終是機器人單元設計中的關鍵組成部分。而且為確保自動化項目的經濟因素和實際應用,選擇合適的robotiq夾具至關重要。下面讓顯揚科技給你介紹,為您的應用選擇合適的robotiq夾具時必須考慮的因素。
過程:
您的機器人將處理什么任務?自動化項目因項目而異。
1.任務本身:機器人要完成的任務通常決定了應該使用的robotiq夾具類型。非常快速的裝載/卸載要求選擇真空的夾具,但較慢的過程則側重于鉗子或手指的準確性。
2.循環時間:夾緊、打開或關閉夾持器所需的速度將決定循環時間。循環時間還將決定加速度和來自夾具的夾持力,較重的夾具將對機器人施加更大的夾持力并導致其部件磨損。機器人最大加速度的規格是通過夾具重量和零件的總和計算的,因此更多的夾具重量意味著您處理的零件的重量更輕。
3.精度需求:一些裝配工作需要很高的精度,用伺服電機的夾具將是理想的選擇。零件分揀過程需要夾具的適應性,以確保零件可以分揀,特別是那些尺寸各異或彼此位置不同的零件。
4.環境需求:并非所有類型的夾具都可以用于每個過程。例如,在食品和制藥行業,液壓主動式夾具是被禁止的,因為存在溢出和污染的風險。在許多潔凈室行業中,也不建議使用真空和氣動夾具,因為它們會在空氣中產生顆粒流。在鑄造廠、加工和焊接等不太清潔的環境中使用的夾具會暴露在污垢和顆粒中,因此必須對其進行保護。核工業或化學工業中的腐蝕性或有毒環境也會產生保護夾具的特殊考慮因素,以確保其穩定性和使用安全性。在大多數應用中,夾具必須具有故障安全功能。
零件:
了解要操縱的零件對于確定應使用哪種夾具至關重要。主要因素是:
1.大小:除真空夾持器外,其他夾持器都需要以平行或有角度的閉合方式夾持零件。這意味著零件越大,夾持器手指所需的距離就越多。夾具必須有足夠的范圍來處理零件,但不能過大,因為較長的手指會在工具和機器人上產生更大的扭矩。
2.形狀:物體的形狀將決定可以做哪種抓取。平坦的表面可以通過真空或磁鐵類型的夾具處理,而其他形狀則可以通過鉗口,爪子或多個手指處理。當使用包裹或指尖抓握時,必須考慮計算手指伸展距離。
3.重量:為確保抓握,夾具必須具有足夠的力來滿足零件的重量,并需要計算其在此過程中可以承受的加速度。
4.表面類型:在估計摩擦力時,零件抓取的表面類型也將是一個重要因素。
顯揚科技專注研發并產業化高速高清三維機器視覺設備、智能協作機器人系統,使命是“讓人類高效地用好機器人”。目前,顯揚科技自主研發的三維機器視覺兼容多種品牌的機器人并已成功應用于食品、電器、陶瓷、物流、教育科技、新零售等行業。此外,顯揚科技生態系統包括以下品牌:UR優傲協作機器人 、AUBO遨博移動機器人、Franka Emika 協作機器人、艾利特Elite協作機器人、Kuka iiwa 協作機器人、ABB工業機器人、海康工業鏡頭 、海康工業相機、伯朗特工業機器人、 愛普生Epson工業機器人、 robotiq夾爪 、robotiq真空吸盤、robotiq腕部相機、慧靈機器人電爪 、大寰機器人電爪、研華工控機、超恩工控機、創想三維3D打印機 、Mir AGV、機器人關節、精密機械加工服務。


