探索UR機器人丨零件拾取應用案例
發布時間:2021-06-24 17:05:13 作者:顯揚科技
優傲機器人Polyscope 5.4中的新遠程TCP功能解釋
RTCP在諸如膠合,去毛刺,縫紉,拋光等許多工藝應用中,通常更容易用機器人拾取零件并以固定工具(例如砂帶,去毛刺工具,縫紉機,拋光輪等在機器人的末端拾起砂帶并移動它畢竟不是很方便。或者您可以想象將一臺縫紉機連接到機器人手臂的末端并移動它。
這些工具不僅通常很重,而且通常也不是為與機器人集成而設計的,因此可能需要大量的設計工作或定制。協作機器人的整體理念是它們靈活且易于使用。
但配藥怎么樣?事實上,有機器人分配末端執行器可用。是的,但如果您使用機器人移動點膠末端執行器,那么您可能還需要一些其他自動化功能來將部件從膠合機器人前面移出。只有一個機器人進行材料處理并將零件展示給固定的膠合分配器會不會更容易?在某些情況下它是。這些只是Polyscope 5.4中新的,超級易用的遠程TCP功能的一些例子。
遠程工具中心點(通常稱為遠程TCP或RTCP)使用戶能夠相對于固定(遠程)TCP編程圓移動和路徑點。然而,這些熟悉而簡單的命令解鎖了幕后發生的強大計算魔法。系統計算如何控制機器人的速度,加速度和減速度,以在RTCP上實現零件的恒定速度。如果沒有RTCP功能,特別是在零件邊緣的圓弧周圍進行編程非常具有挑戰性。它可以使用非常小的步驟和一些微調來完成,但這可以導致數千行的程序。其他替代方案可以通過演示或離線機器人編程軟件來教授。但那些可能是不精確/難以微調或昂貴/需要學習完整的編程環境。RTCP功能嵌入在eSeries機器人中,這些命令直接插入編程樹中,因此無需額外學習即可使用該功能。這很精確。運動平穩流暢,每次運動的執行之間沒有停止或暫停。
查看使用RTCP功能創建的這兩個演示。
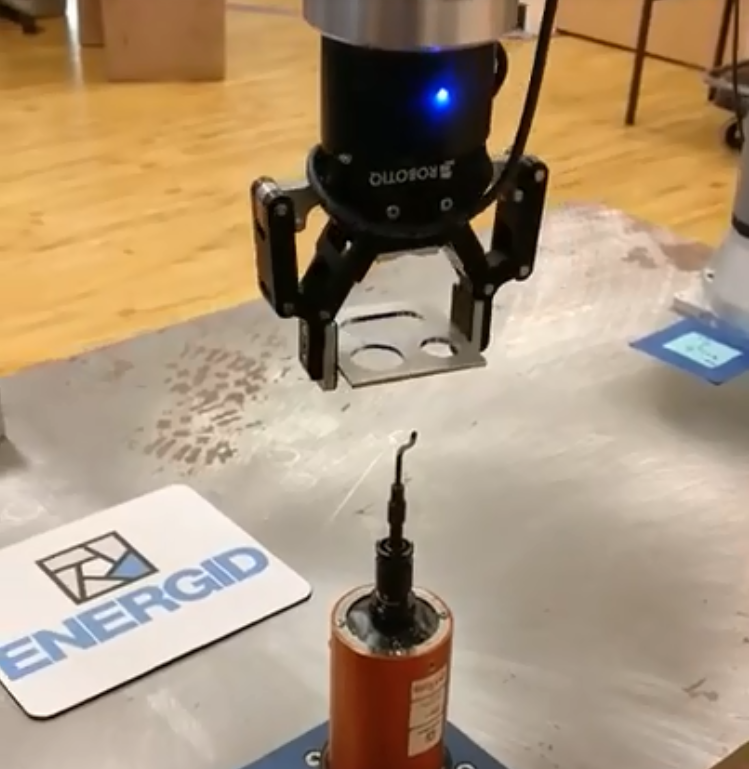
第一個演示中, ATI兼容去毛刺刀片(CDB) 固定在工作臺上。配備Robotiq 2F-85自適應夾具的UR10e機器人,將金屬部件呈現給ATI CDB,以去除內部特征。機器人相對于ATI CDB以恒定速度移動零件。
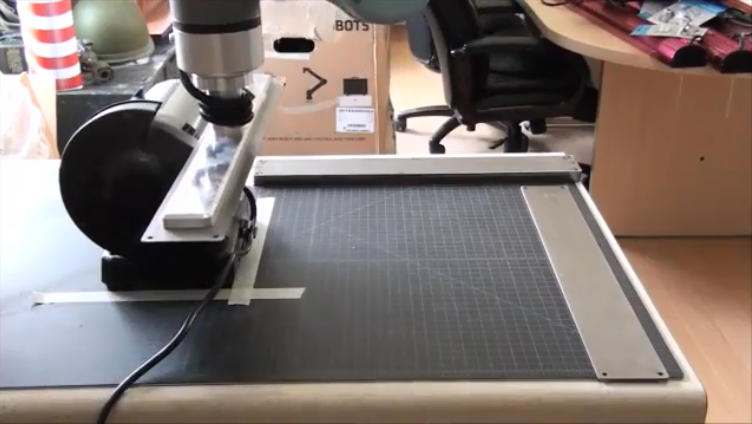
第二個演示中,輪式砂光機固定在工作臺上。UR10e機器人配備定制真空末端執行器,一次拾取一個金屬板,并將該部件呈現給砂輪打磨機以去除外部輪廓。機器人能夠以相對于砂光機的恒定速度移動零件。
顯揚科技優勢:
顯揚科技是國家高新技術企業,在機器人、機器視覺方面有多年的研發與產業化經驗,可為你提供完善的售后與保修服務,以及其他研發方面協作,并且提供專用移動機器人工作臺。顯揚科技優勢:
顯揚科技已成功銷售Franka機器人、UR機器人、Robotiq夾具等產品給浙江大學,清華大學,哈爾濱工業大學等,獲得了非常好的評價。顯揚科技研發人員超過50人,精通UR,Franka,遨博機器人安裝、調式、二次開發等,對基于協作機器人的各種應用開發已有超過8年經驗。
關于顯揚科技:
顯揚科技(www.bssteel.com.cn)專注研發并產業化高速高清三維機器視覺設備、智能協作機器人系統。顯揚科技創建了一個集高精度視覺傳感器、智能協作機器人、智能感知與控制系統平臺,讓機器人更加智能、可靠,適用于更多復雜的應用場景。顯揚科技研發的三維機器視覺設備精度能達亞微米級,三維數據采集幀率高達300幀,具有高精度、大景深、高穩定性的優勢,已在多個領域成功替代進口同類產品。目前,顯揚科技產品已成功應用于食品、電器、陶瓷、物流、教育科技、新零售等行業。顯揚科技創始團隊由香港中文大學數名博士組成,公司研發人員均來自海內外名校。公司知識產權超過50項,產品已經通過歐盟CE認證。顯揚科技已完成投資與融資約5000萬人民幣。
顯揚生態: UR優傲協作機器人 | AUBO遨博移動機器人 | Franka 協作機器人 | 艾利特協作機器人 | Kuka iiwa 協作機器人 | ABB工業機器人 | 海康工業鏡頭 | 海康工業相機 | 伯朗特工業機器人 | 愛普生Epson工業機器人 | robotiq夾爪 | robotiq真空吸盤 | robotiq腕部相機| 慧靈機器人電爪 | 研華工控機 |超恩工控機 | 創想三維3D打印機 | AGV | 機器人關節 | 精密機械加工服務
應用案例方向:1.三維機器視覺機器人引導系統 2.工業檢測與測量系統3.教育行業解決方案4.智慧零售解決方案
應用場景:汽車制造行業 | 3C行業 | 電子電氣 | 機械加工 | 液晶半導體 | 食品加工行業 | 醫藥行業 | 化工行業 | 教育行業 | 生活 | 其他行業
詳詢:18670025215(丁先生) www.bssteel.com.cn

