雙目視覺的成像理論
發布時間:2022-09-12 14:07:13 作者:顯揚科技
雙目視覺是機器視覺的一種重要形式,通過模擬人類雙眼感知外界物體的位置信息,輸送給大腦并分析出該物體在空間中的位置過程,雙目視覺是利用電腦設備被動感知物體空間信息。雙目視覺系統相對于單目視覺的優點主要是它存在視差,可以利用該視差來恢復物體的深度信息。它的核心是從至少兩個及以上的觀測點拍攝物體,得到同時包含物體的左右兩幅圖像,并根據數學模型之間坐標系相互關系,求解物體的空間幾何位置。
攝像機的成像模型
為了處理三維圖像和二維圖像之間的映射關系,需要在映射中加入攝像機產生圖像過程的投影特性。針孔攝像機模型是圖像處理人員常用的模型之一。該模型簡單易懂,能滿足日常的開發需求。
該模型成立的必要條件是光線沿直線傳播,由P點光源發出的光線經過光心后將會在另一面呈現出倒立點p,其中f為焦距,S為光源與光心間的距離。根據三角形相似關系,即可求解相應參數,這就是小孔成像的原理。而攝像機一般是由多組透鏡構成,但基本原理與之相同。該模型確定了現實世界中目標物體的三維圖像與投影平面上的二維圖像之間的映射關系,是后續三維信息恢復與重構的基礎。
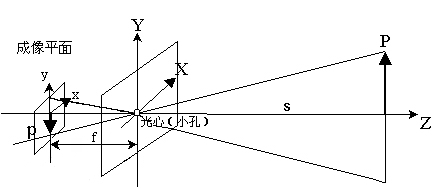
小孔成像原理
攝像機成像的線性模型
線性模型是基于理想情況下的映射關系,在雙目立體視覺中,主要根據四個坐標系建立空間點與圖像點之間的映射關系,即圖像像素坐標系、圖像物理坐標系、攝像機坐標系、世界坐標系。各坐標系的關系如圖1所示。
對于任何物體的衡量都是相對的,都需要選擇一個基準,因此建立世界坐標系(OW-XWYWZW)來衡量空間中攝像機和目標物體的空間位置是不可或缺的。因為世界坐標系是變化的,故想要直接確定圖像平面與世界坐標系之間的相對位姿關系是困難的。
提前做個假設:假設攝像機的內部結構不會因為外部環境的變化而變化,如此小孔成像模型的透視投影中心就是確定不變的,換言之,其相對于成像平面的位置是可以被確定的。以光心為基準建立攝像機坐標系OC-XCYCZC,如下圖所示。ZC軸為指向攝像機視線方向,與攝像機的光軸重合,XC、YC軸分別平行于圖像平面的橫向、縱向。光軸與圖像平面的交點記為o,稱為圖像平面的主點。
為了在圖像像素坐標系和攝像機坐標系之間建立聯系,需要在圖像平面上建立一個過渡坐標系,稱之為圖像物理坐標系。圖像物理坐標系的原點為o,坐標的橫軸和縱軸分別與圖像平面橫軸和縱軸平行。圖像物理坐標系的建立將無量綱像素值與物理單位建立了聯系。在計算機內部,所有數字圖形通常都是根據圖像的分辨率以數組形式存儲,數組中的元素表示圖像點的灰度值。
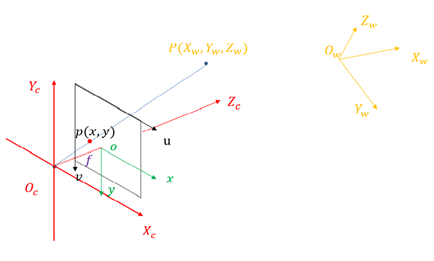
坐標系之間的幾何關系
顯揚科技由香港中文大學博士團隊創建,主要研究并產業化高速高清三維機器視覺系統,以及智能工業機器人系統。其研發的三維機器視覺設備精度能達亞微米級,三維數據采集幀率高達310幀,此外還具有高精度、大景深、高穩定性的優勢,可實現高效率機器人引導,以及工業檢測與測量。顯揚科技的產品主要應用在對采集速度要求較高的快速工業產線、物流樞紐以及對測量精度要求高的精密制造、軍工航天、半導體產業等。

銷售對接:18670025215(微信同號)
采購對接:17788781937(微信同號)

